Overview
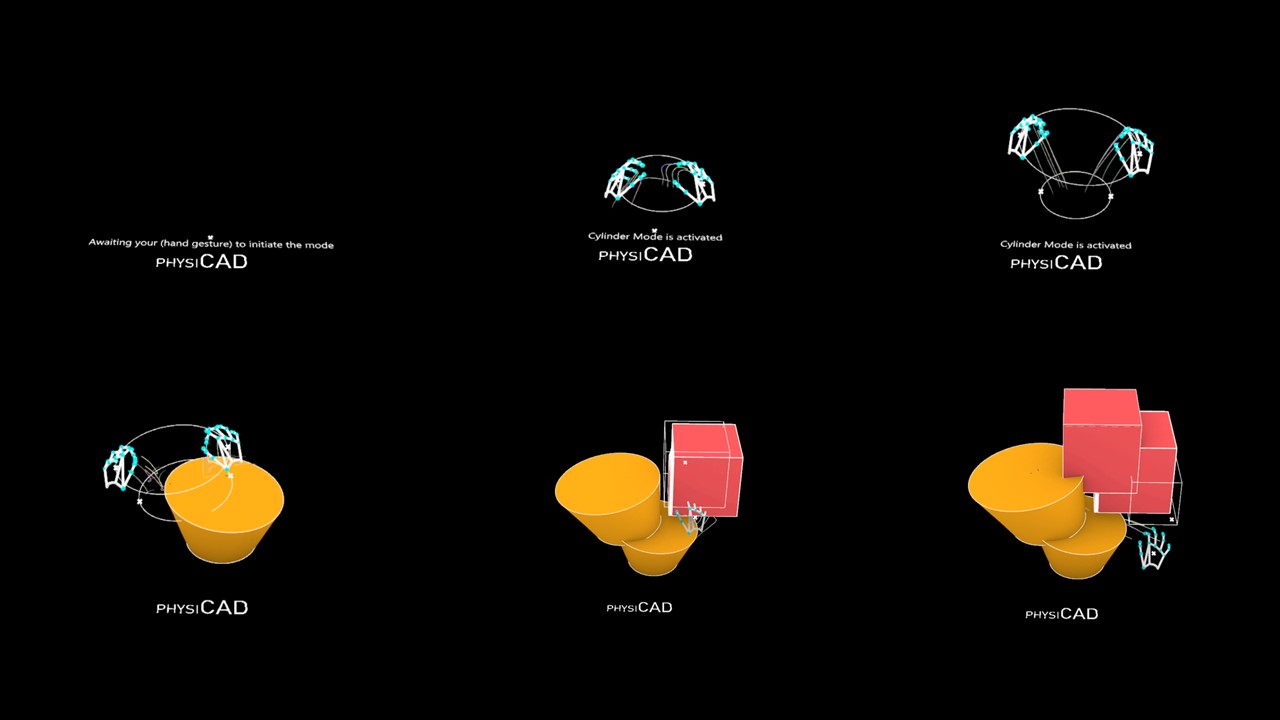
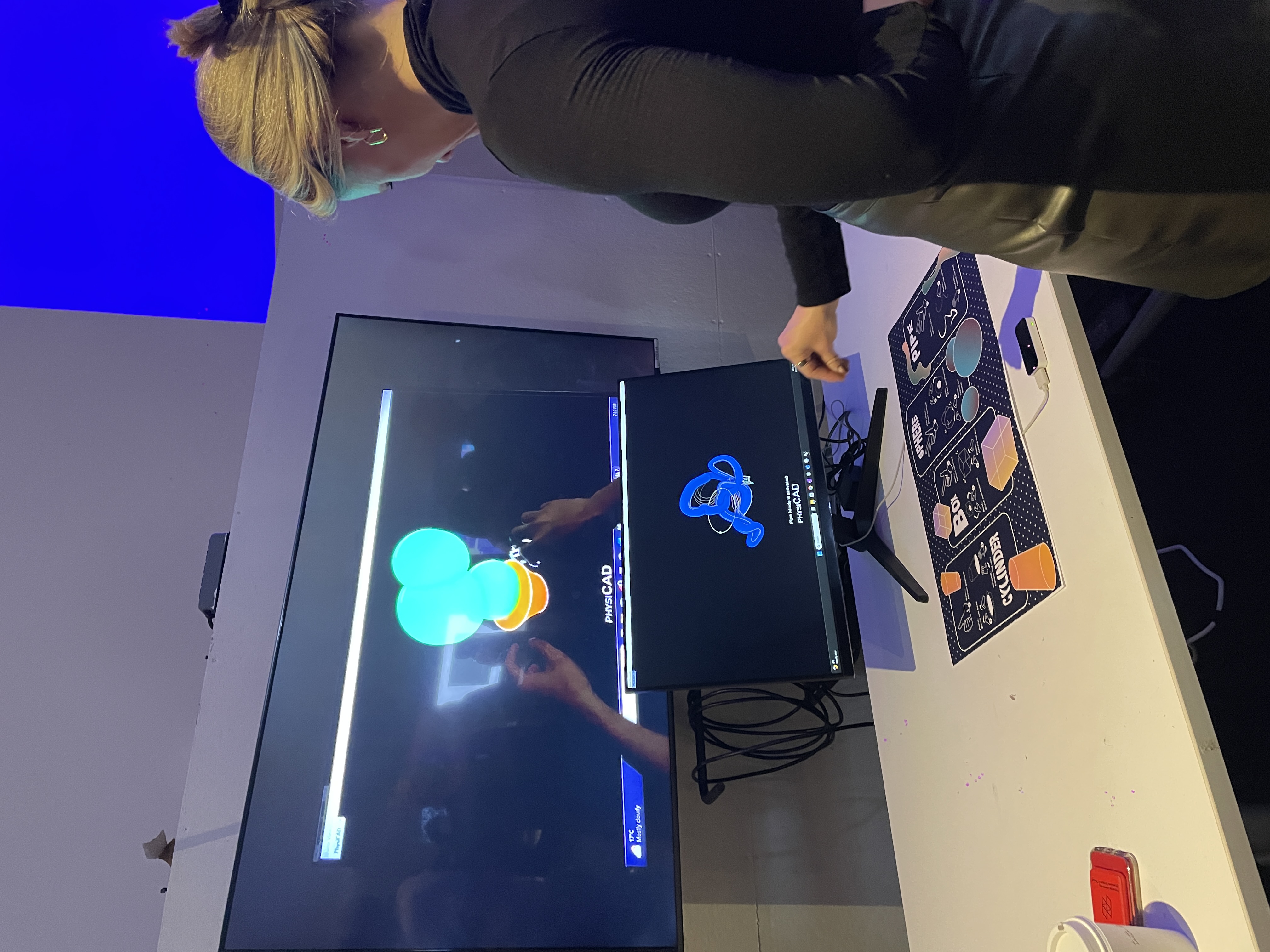
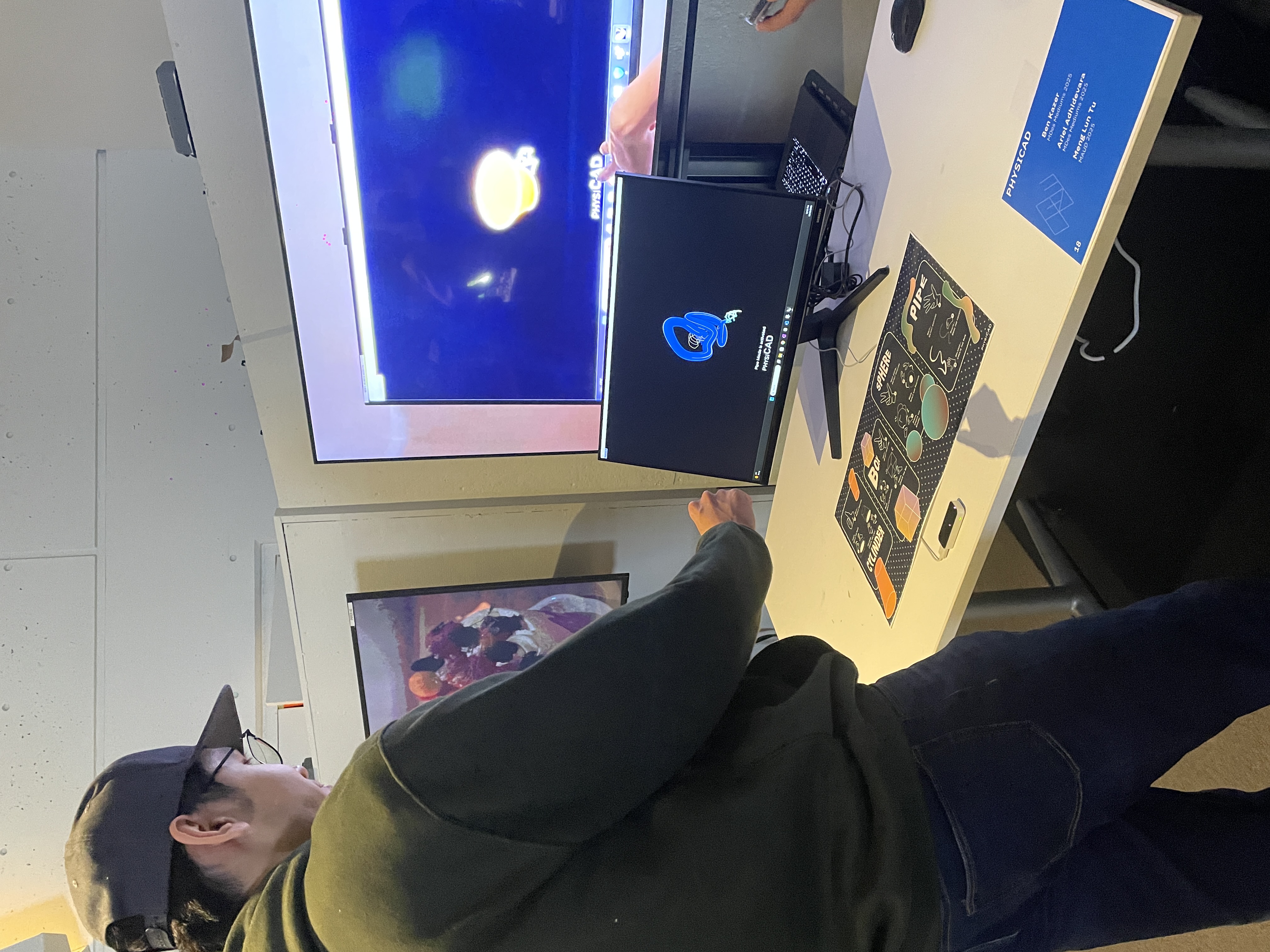
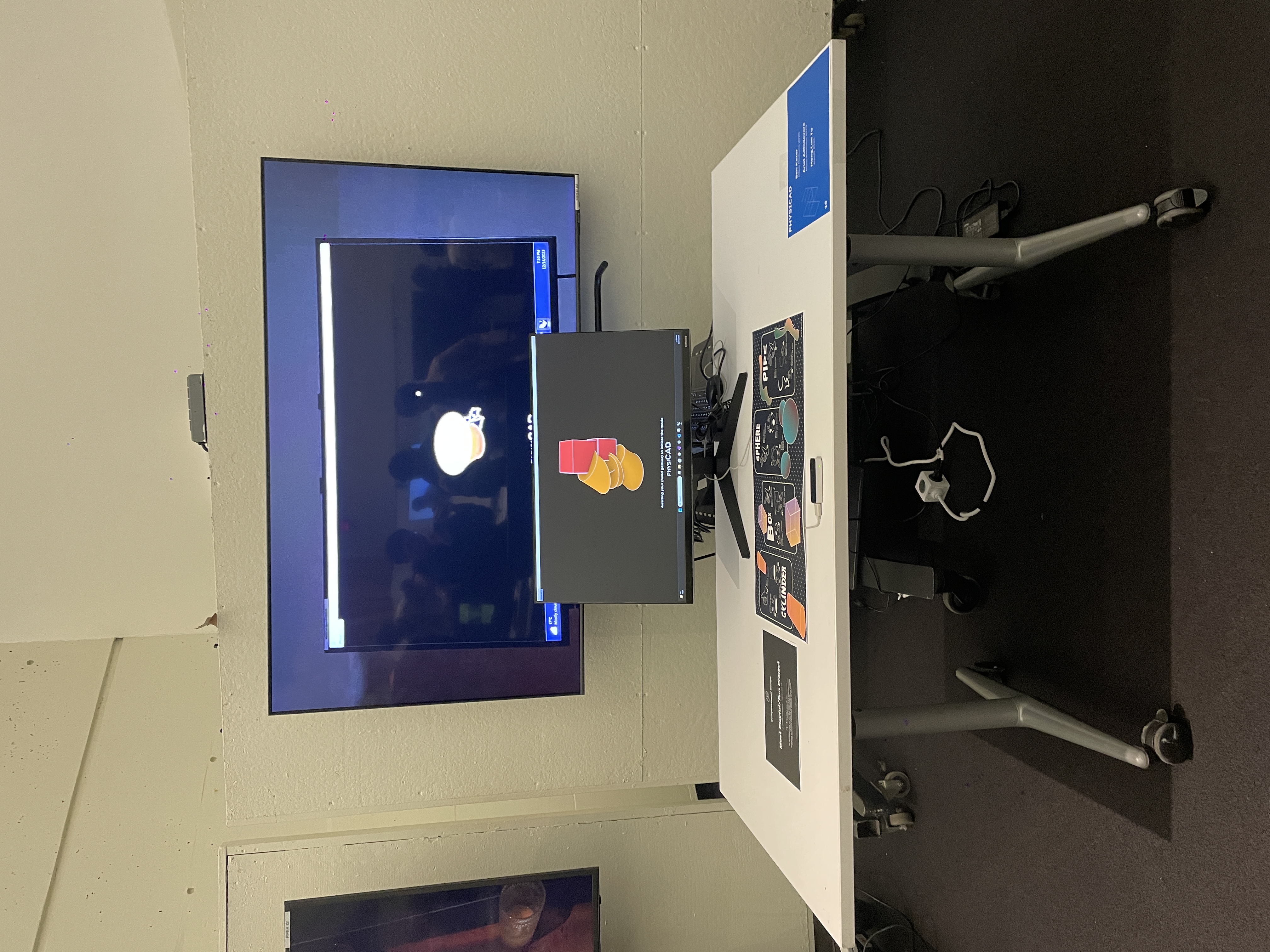
PhysiCAD is an interactive interface that enables users to create 3D models through physical gestures. By translating hand movements into digital geometry, the system reimagines 3D modeling as an embodied and intuitive experience rather than a technical skill. It lowers the barrier to entry while maintaining the precision and logic required for computational design.
Role
Interaction & Technical Lead
Team
Ben Kazer, Joe Tu
Institution / Year
Harvard University - Graduate School of Design 2023
Tools
Grasshopper | C#